Đăng ký nhận báo giá
Thuật toán SLAM là gì? SLAM hoạt động như thế nào


Trong thời đại robot tự hành, xe không người lái, drone, AR/VR và bản đồ số 3D phát triển mạnh mẽ, một trong những công nghệ nền tảng giúp máy móc có thể “nhìn”, “hiểu” và di chuyển trong không gian thực chính là SLAM.
Thuật toán SLAM là gì? SLAM hoạt động như thế nào? Đọc ngay bài viết!
Thuật toán SLAM là gì?
SLAM là viết tắt của Simultaneous Localization and Mapping, có nghĩa là định vị và lập bản đồ đồng thời.
Theo MathWorks, thuật toán SLAM là phương pháp cho phép một hệ thống tự động đồng thời xây dựng bản đồ môi trường xung quanh và xác định vị trí của chính nó trong bản đồ đó mà không cần dữ liệu vị trí ngoài (GPS, bản đồ có sẵn).
Nói một cách dễ hiểu, SLAM giúp một thiết bị trả lời cùng lúc hai câu hỏi: "Tôi đang ở đâu?" và "Môi trường xung quanh tôi trông như thế nào?" hai câu hỏi phải được giải quyết cùng lúc, vì mỗi câu phụ thuộc vào câu kia.
Đây là vấn đề “vòng lặp tính toán” (circular dependency) kinh điển trong robotics: để biết vị trí, cần có bản đồ; để xây bản đồ, cần biết vị trí. SLAM giải quyết điều này bằng cách ước lượng xác suất cả hai yếu tố song song theo thời gian thực.
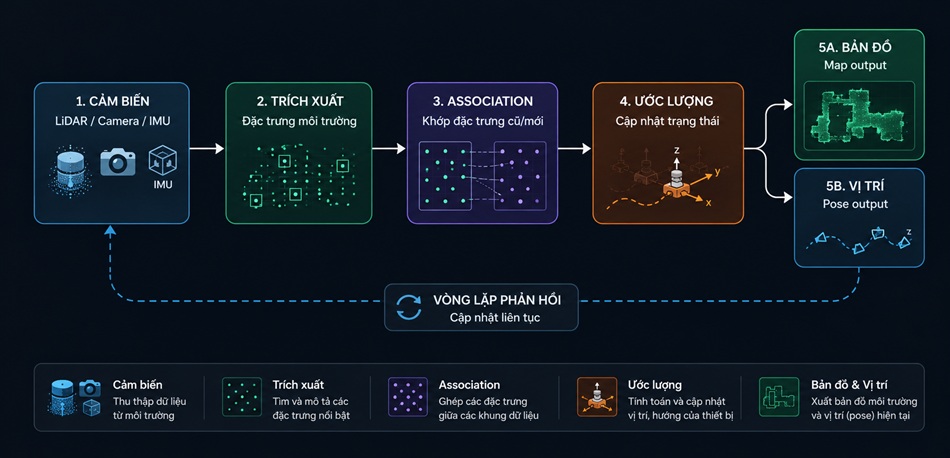
Pipeline của SLAM
SLAM hoạt động như thế nào?
Về bản chất, SLAM là một bài toán ước lượng trạng thái liên tục dưới sự không chắc chắn. Thiết bị vừa di chuyển, vừa quan sát, vừa ghi nhớ, vừa điều chỉnh lại hiểu biết của mình về môi trường. Có hai trường phái chính:
Filter-based SLAM
Dùng Kalman Filter (EKF/UKF) hoặc Particle Filter để duy trì phân phối xác suất của trạng thái. Phù hợp môi trường nhỏ, realtime cứng.
Graph-based SLAM
Biểu diễn lịch sử di chuyển như một pose graph, tối ưu hóa toàn bộ bằng least-squares (g2o, GTSAM). Độ chính xác cao hơn, phổ biến trong nghiên cứu hiện đại.
Thu thập dữ liệu cảm biến
Bước đầu tiên của SLAM là thu thập dữ liệu từ các cảm biến gắn trên thiết bị. Tùy từng ứng dụng, hệ thống có thể sử dụng:
- Camera để ghi nhận hình ảnh môi trường.
- LiDAR để quét khoảng cách bằng tia laser.
- IMU để đo gia tốc, góc nghiêng và chuyển động.
- Radar để phát hiện vật thể trong điều kiện khó quan sát.
- Cảm biến chiều sâu để đo khoảng cách giữa thiết bị và vật thể.
Các dữ liệu này giống như “giác quan” của thiết bị, giúp nhận biết không gian xung quanh.
Trích xuất và mô tả đặc trưng
Với visual SLAM: dùng ORB, SIFT hoặc deep feature detector để xác định keypoint.
Với LiDAR: trích xuất plane, edge, hoặc descriptor như FPFH.
Thuật toán SLAM sẽ tìm kiếm các đặc trưng nổi bật trong môi trường. Đó có thể là góc tường, cạnh bàn, cửa ra vào, cột nhà, vật thể cố định hoặc các điểm có hình dạng dễ nhận biết.
Ví dụ, khi một robot di chuyển trong căn phòng, nó có thể nhận ra góc tủ, mép cửa hoặc vị trí bức tường. Những điểm này được dùng làm mốc tham chiếu để robot theo dõi sự thay đổi vị trí của chính nó.
Ước lượng vị trí và hướng di chuyển
Từ dữ liệu cảm biến và các điểm mốc đã nhận diện, hệ thống sẽ tính toán vị trí hiện tại của thiết bị. Quá trình này không chỉ xác định thiết bị đang ở đâu, mà còn ước lượng hướng di chuyển, tốc độ và góc quay.
Trong kỹ thuật, trạng thái này thường được gọi là pose, bao gồm vị trí và hướng của thiết bị trong không gian. MathWorks cho biết SLAM sử dụng dữ liệu từ các cảm biến như camera, LiDAR và IMU để ước lượng pose, quỹ đạo di chuyển và bản đồ môi trường.
Xây dựng bản đồ môi trường
Khi thiết bị di chuyển, các dữ liệu thu được sẽ được ghép lại để tạo thành bản đồ. Bản đồ này có thể ở nhiều dạng khác nhau, chẳng hạn:
- Bản đồ 2D dạng mặt bằng.
- Bản đồ 3D dạng point cloud.
- Bản đồ lưới thể hiện khu vực trống và vật cản.
- Bản đồ trực quan phục vụ thực tế ảo VR và thực tế ảo tăng cường AR.
Bản đồ càng được cập nhật nhiều, thiết bị càng hiểu rõ môi trường hơn. Đây là lý do robot hút bụi sau một vài lần hoạt động có thể ghi nhớ sơ đồ căn nhà tốt hơn, hoặc drone khảo sát có thể tái dựng lại không gian 3D từ dữ liệu bay.
Hiệu chỉnh sai số và nhận diện vòng lặp
Trong quá trình di chuyển, sai số là điều khó tránh khỏi. Chỉ cần cảm biến đo lệch một chút, sau một quãng đường dài, sai số có thể tích lũy và khiến bản đồ bị méo hoặc vị trí bị lệch.
Để khắc phục, SLAM sử dụng kỹ thuật gọi là loop closure, tức là nhận diện khi thiết bị quay lại một nơi đã từng đi qua. Khi phát hiện vị trí quen thuộc, hệ thống sẽ so sánh dữ liệu mới với dữ liệu cũ để điều chỉnh lại bản đồ và quỹ đạo di chuyển. NVIDIA Isaac ROS mô tả loop closure là quá trình giúp giảm độ bất định trong bản đồ khi hệ thống nhận ra một khu vực đã từng được quan sát trước đó.
Công thức trạng thái cốt lõi
p (x_t, m | z_1:t, u_1:t)
— Phân phối xác suất đồng thời của pose (x) và bản đồ (m)
dựa trên chuỗi quan sát z và lệnh điều khiển u theo thời gian
Các biến thể chính của SLAM
Visual SLAM (vSLAM)
Visual SLAM sử dụng camera làm cảm biến chính. Hệ thống phân tích hình ảnh để xác định vị trí camera và xây dựng bản đồ môi trường. Theo MathWorks, Visual SLAM thường được ứng dụng trong thực tế tăng cường, robot và xe tự hành.
Ưu điểm của Visual SLAM là chi phí cảm biến thấp, dễ tích hợp trên điện thoại, kính AR, robot nhỏ và drone. Tuy nhiên, nó có thể bị ảnh hưởng bởi ánh sáng yếu, bề mặt ít chi tiết hoặc môi trường thay đổi nhanh.
LiDAR SLAM
LiDAR SLAM sử dụng cảm biến laser để đo khoảng cách và tạo bản đồ không gian. Loại SLAM này thường có độ chính xác cao, đặc biệt phù hợp với xe tự hành, robot công nghiệp, khảo sát địa hình và bản đồ 3D.
Ưu điểm của LiDAR SLAM là hoạt động tốt trong nhiều điều kiện ánh sáng và có khả năng tạo point cloud chi tiết. Nhược điểm là chi phí cảm biến LiDAR thường cao hơn camera.
RGB-D SLAM
RGB-D SLAM sử dụng camera màu kết hợp cảm biến chiều sâu. Công nghệ này không chỉ ghi nhận hình ảnh mà còn biết khoảng cách từ thiết bị đến vật thể.
RGB-D SLAM phù hợp với các ứng dụng trong nhà, robot dịch vụ, mô hình hóa không gian và tương tác thực tế ảo.
Multi-sensor SLAM
Multi-sensor SLAM kết hợp nhiều loại cảm biến như camera, LiDAR, IMU, GPS, radar để tăng độ chính xác và độ ổn định.
Ví dụ, camera cung cấp hình ảnh, IMU cung cấp dữ liệu chuyển động, LiDAR cung cấp khoảng cách chính xác. Khi kết hợp lại, hệ thống có thể hoạt động tốt hơn trong môi trường phức tạp.
Semantic SLAM
Semantic SLAM không chỉ lập bản đồ hình học, mà còn hiểu ý nghĩa của các đối tượng trong môi trường. Thay vì chỉ biết “có một vật thể phía trước”, hệ thống có thể nhận diện đó là “cái bàn”, “cánh cửa”, “con người” hoặc “biển báo”.
Đây là hướng phát triển quan trọng khi SLAM kết hợp với AI (trí tuệ nhân tạo) và thị giác máy tính.
Ứng dụng thực tế của SLAM?
SLAM hiện diện trong rất nhiều công nghệ quen thuộc.
Trong robot hút bụi: SLAM giúp robot ghi nhớ sơ đồ căn nhà, nhận biết khu vực đã làm sạch và tự tìm đường quay về dock sạc.
Roomba iRobot, Roborock dùng LiDAR/Visual SLAM để vẽ bản đồ tầng trệt và lên kế hoạch dọn dẹp tối ưu.

Trong xe tự hành: SLAM hỗ trợ xe hiểu môi trường xung quanh, xác định vị trí trên đường và phát hiện vật cản.
Tesla, Waymo dùng LiDAR SLAM kết hợp HD map để điều hướng đô thị không cần GPS đáng tin cậy.
UAV / Drone: SLAM giúp thiết bị bay ổn định, tránh chướng ngại vật và lập bản đồ khu vực khảo sát.
Trong AR/VR: SLAM giúp thiết bị hiểu không gian thật để đặt vật thể ảo đúng vị trí. Nhờ đó, khi người dùng di chuyển, vật thể ảo vẫn giữ được vị trí ổn định trong môi trường thực.
Trong công nghiệp, SLAM được dùng cho robot kho hàng, robot kiểm tra nhà máy, hệ thống tự động hóa và bản đồ hóa không gian sản xuất.
Trong bản đồ số và mô hình 3D, SLAM hỗ trợ ghi nhận dữ liệu không gian, tái dựng môi trường thực và tạo nền tảng cho các trải nghiệm tương tác.
Tương lai của SLAM
Trong tương lai, SLAM sẽ tiếp tục phát triển cùng với AI, thị giác máy tính, cảm biến 3D và điện toán biên. Các hệ thống SLAM mới không chỉ dừng lại ở việc lập bản đồ hình học, mà còn hướng đến khả năng hiểu ngữ cảnh, nhận diện vật thể, dự đoán chuyển động và hỗ trợ ra quyết định thông minh.
Khi robot, drone, xe tự hành, kính AR và thiết bị thông minh ngày càng phổ biến, SLAM sẽ trở thành một trong những công nghệ nền tảng giúp máy móc tương tác tự nhiên hơn với thế giới thực.
SLAM không phải một thuật toán đơn lẻ mà là một framework giải quyết bài toán - tùy bài toán cụ thể mà lựa chọn kiến trúc, cảm biến và backend tối ưu khác nhau.
Có thể xem SLAM như “khả năng ghi nhớ và định hướng” của máy móc. Giúp thiết bị hiểu mình đang ở đâu, đã đi qua những đâu và môi trường xung quanh có cấu trúc như thế nào.
Tin tức mới nhất
Bài viết cùng chủ đề

Góc nhìn: Quy chế chuyển đổi số xã phường hiện nay
 14/07/2026
14/07/2026 
Plane Detection: Công nghệ nhận diện mặt phẳng trong AR
29/06/2026 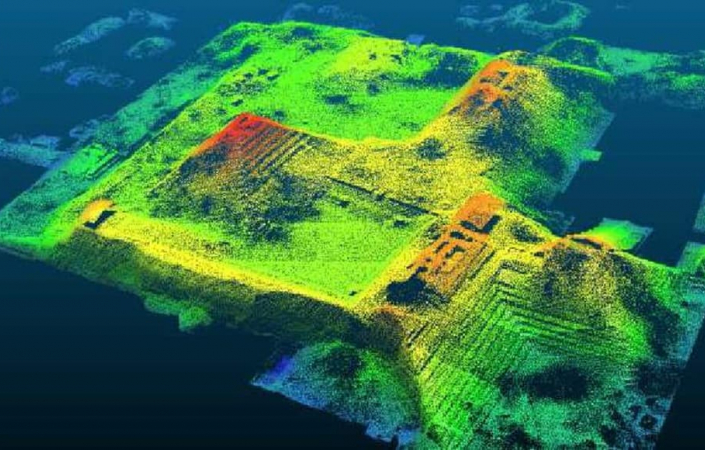
LiDAR là gì? Nguyên lý, ứng dụng và vai trò trong số hóa không gian
26/06/2026 
Light Estimation là gì? Ranh giới giữa thực và ảo
15/06/2026 
Cinematic VR là gì? Tương lai của trải nghiệm kể chuyện nhập vai
12/06/2026 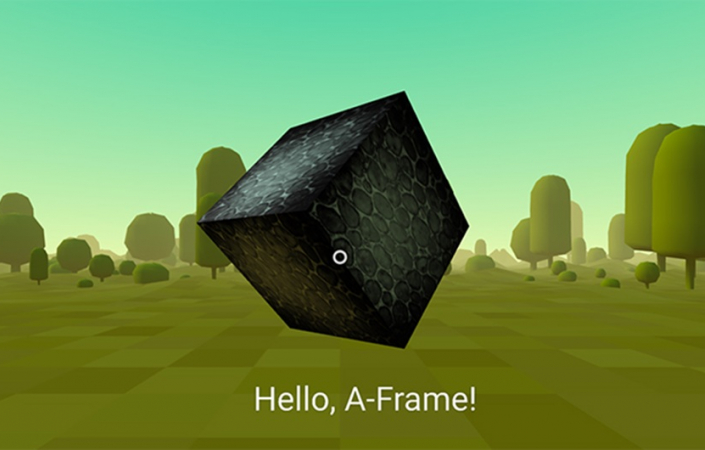
WebXR là gì? Công nghệ nền tảng cho trải nghiệm AR/VR trên trình duyệt web
12/06/2026 
Point Cloud là gì? Công nghệ nền tảng của số hóa không gian 3D
10/06/2026 
Real Time 3D là gì? Ứng dụng & lợi ích cho doanh nghiệp
09/06/2026 
Case Study: Cách ứng dụng Virtual tour trong công tác tuyển sinh
25/05/2026 Khách hàng tiêu biểu




























































Đăng ký nhận thông tin từ VR360
Địa chỉ Đăng ký Giấy phép Kinh doanh: 63 Phan Đăng Lưu, Phường Hoà Cường Nam, Quận Hải Châu, Thành phố Đà Nẵng, Việt Nam
