Đăng ký nhận báo giá
Point Cloud là gì? Công nghệ nền tảng của số hóa không gian 3D

Mục lục
Point Cloud hoạt động như thế nào?
Thiết bị thu thập dữ liệu Point Cloud
Point Cloud được thu thập như thế nào?
Lợi ích của Point Cloud trong số hóa không gian
Ứng dụng của Point Cloud trong thực tiễn
Quy hoạch đô thị và xây dựng hạ tầng
Quản lý lâm nghiệp và môi trường
Mô hình hóa và ứng phó thảm họa
Lập bản đồ và khảo sát địa hình chính xác

Khi một tòa nhà hay toàn bộ đô thị cần được số hóa chính xác đến từng centimet, không có công cụ nào làm được điều đó tốt hơn Point Cloud. Đây là nền tảng dữ liệu đứng sau hàng loạt công nghệ tiên tiến nhất hiện nay: Digital Twin, bản đồ 3D, khảo sát địa hình...
Bài viết này phân tích toàn diện Point Cloud là gì, cách công nghệ này thu thập và xử lý dữ liệu. Đọc ngay bài viết!

1. Point Cloud là gì?
Point Cloud (đám mây điểm) là một biểu diễn kỹ thuật số chi tiết của một đối tượng 3D. Về bản chất, Point Cloud là tập hợp các điểm dữ liệu không gian, trong đó mỗi điểm riêng lẻ đại diện cho một vị trí nhỏ trên bề mặt của đối tượng được quét, được biểu thị bằng tọa độ X, Y, Z. Khi sử dụng máy quét 3D để ghi lại hình dạng của một vật thể hoặc không gian vật lý, định dạng tệp thu được chính là một Point Cloud.
Ngoài ba tọa độ không gian, mỗi điểm còn có thể mang theo các thuộc tính quang học như độ phản xạ và màu sắc. Nhiều vị trí quét được ghép lại để tạo thành Point Cloud của toàn bộ cảnh, có thể được tải vào hầu hết các nền tảng CAD để phục vụ công việc thực địa tiêu chuẩn.
Để dễ hình dung: hãy tưởng tượng bạn đứng trước một tòa nhà lịch sử và cần ghi lại chính xác từng đường nét kiến trúc của nó. Thay vì chụp ảnh 2D hay đo tay từng điểm, máy quét laser sẽ bắn hàng triệu tia sáng lên bề mặt công trình và ghi lại tọa độ 3D của từng điểm phản xạ tạo thành một "đám mây điểm" dày đặc, tái hiện lại toàn bộ không gian với độ chính xác milimet.
Point Cloud được xem là một trong những trụ cột nền tảng để biểu diễn cảnh quan kỹ thuật số 3D, bất chấp cấu trúc liên kết bất thường giữa các điểm dữ liệu rời rạc.
Ví dụ ứng dụng thực tế:
- Bảo tàng số hóa hiện vật di sản bằng quét laser để lưu trữ không gian 3D vĩnh viễn
- Đơn vị xây dựng quét hiện trạng công trình để đối chiếu với bản vẽ BIM
- Drone quét toàn bộ rừng để đo chiều cao tán cây và ước tính trữ lượng gỗ
- Thành phố thông minh quét đô thị tạo Digital Twin phục vụ quy hoạch
2. Point Cloud hoạt động như thế nào?
2.1. Thiết bị thu thập dữ liệu Point Cloud
Point Cloud 3D được tạo ra bằng các công nghệ và phương pháp quét như LiDAR, UAV/Drone, Hệ thống vệ tinh dẫn đường toàn cầu (GNSS), quét ánh sáng có cấu trúc, Photogrammetry. Các phương pháp này thu thập dữ liệu về hình học và thông tin không gian của các đối tượng bằng cách đo khoảng cách, mẫu ánh sáng hoặc phản xạ sóng.
Các loại thiết bị phổ biến nhất hiện nay:
- LiDAR (Light Detection and Ranging): Một dạng thị giác máy tính, trong đó ánh sáng laser được phát ra và phản xạ trở lại cảm biến hoạt động giống như võng mạc của con người. Mỗi điểm ánh sáng được phản xạ và thu nhận bởi cảm biến trở thành một điểm trong Point Cloud, tạo thành hình ảnh 3D cuối cùng.
- Máy quét laser mặt đất: Thiết bị cố định hoặc di động được sử dụng để quét tòa nhà, cầu, hầm mỏ và công trình hạ tầng với độ phân giải cao.
- Drone: Phù hợp để quét các khu vực rộng lớn như rừng, bờ biển, công trình giao thông từ trên cao, là lựa chọn lý tưởng cho các ứng dụng đòi hỏi thu thập dữ liệu nhanh trên địa bàn rộng như lâm nghiệp và khảo sát.
- Photogrammetry (đo ảnh lập thể): Để tạo Point Cloud bằng photogrammetry, nhiều ảnh của một cảnh được chụp từ các góc độ khác nhau. Phương pháp này cho phép dùng camera thông thường hoặc drone không tích hợp LiDAR để tái tạo Point Cloud từ ảnh, chi phí thấp hơn đáng kể.
2.2. Point Cloud được thu thập như thế nào?
Quy trình thu thập dữ liệu Point Cloud diễn ra theo các bước sau:
- Bước 1: Quét hiện trường: Thiết bị (laser scanner, LiDAR drone, hoặc camera) được đặt tại nhiều vị trí chiến lược xung quanh đối tượng hoặc khu vực cần số hóa. Mỗi vị trí quét sẽ tạo ra một Point Cloud cục bộ.
- Bước 2: Đăng ký và ghép dữ liệu: Nhiều vị trí quét được đăng ký, ghép lại để tạo thành Point Cloud của toàn bộ cảnh. Quá trình này sử dụng các control points hoặc thuật toán ICP để căn chỉnh các đám mây điểm riêng lẻ thành một tập dữ liệu thống nhất.
- Bước 3: Lọc nhiễu và làm sạch: Dữ liệu thô luôn chứa "noise" các điểm sai lệch do phản xạ không mong muốn, chuyển động của đối tượng hay hạn chế thiết bị. Bước này loại bỏ các điểm bất thường để đảm bảo chất lượng.
2.3. Xử lý dữ liệu Point Cloud
Sau khi thu thập, dữ liệu thường được xử lý hậu kỳ để tinh chỉnh, nâng cao độ chính xác và chuyển đổi sang các nền tảng ứng dụng khác nhau.
Các bước xử lý chính:
- Phân loại: Phân tách các điểm theo loại đối tượng - mặt đất, tòa nhà, thực vật, cơ sở hạ tầng. Đây là bước cần thiết để trích xuất thông tin có ý nghĩa từ dữ liệu thô.
- Chuyển đổi sang mesh 3D: Mô hình mesh 3D được tạo ra từ dữ liệu Point Cloud, sau đó các khiếm khuyết và phần bị thiếu trong mesh được hiệu chỉnh thủ công.
Tích hợp với BIM/GIS/Digital Twin: Point Cloud sau xử lý được nhập vào các nền tảng như Autodesk Revit, ArcGIS, hoặc hệ thống Digital Twin để phục vụ phân tích không gian, quy hoạch và quản lý tài sản.
3. Lợi ích của Point Cloud trong số hóa không gian
Độ chính xác vượt trội so với phương pháp truyền thống: Point Cloud có thể đạt độ chính xác đến mức milimet, loại bỏ sai số đo đạc thủ công và rút ngắn đáng kể thời gian khảo sát hiện trường.
Tái tạo không gian toàn diện và trung thực: Point Cloud là bản chụp thực tế 3D của một không gian, trong đó mỗi điểm đều mang tọa độ trong không gian cùng màu sắc. Công nghệ này có thể thay thế hoàn toàn các quy trình khảo sát truyền thống.
Nền tảng dữ liệu linh hoạt, đa ứng dụng: Point Cloud được sử dụng cho nhiều mục đích, bao gồm tạo mô hình CAD 3D hoặc GIS cho các bộ phận chế tạo, đo lường và kiểm tra chất lượng, cũng như hàng loạt ứng dụng trực quan hóa, hoạt hình, kết xuất và tùy chỉnh hàng loạt.
Tốc độ thu thập dữ liệu quy mô lớn: Trong vài giờ, drone tích hợp LiDAR có thể quét hàng trăm hecta rừng, khu đô thị hay tuyến đường cao tốc.
Số hóa di sản: Các công trình lịch sử, bảo vật văn hóa hay địa điểm khảo cổ được ghi lại chính xác mà không cần tiếp xúc vật lý bảo toàn nguyên vẹn trong không gian số vĩnh viễn.
Cơ sở cho Digital Twin và AI phân tích không gian: Point Cloud là nền tảng để tạo ra một Digital Twin chính xác - bản sao kỹ thuật số của không gian thực. Dữ liệu Point Cloud kết hợp với AI cho phép phân tích tự động: phát hiện thay đổi theo thời gian, dự báo hư hỏng kết cấu, tối ưu hóa quy hoạch.
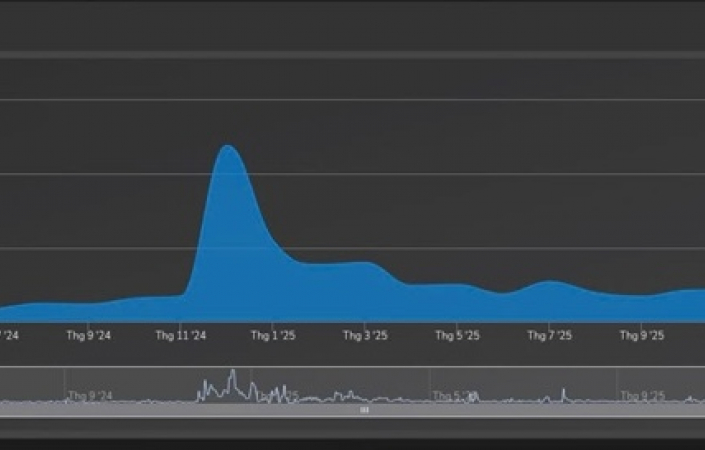
Thị trường tăng trưởng mạnh xác nhận giá trị: Thị trường phần mềm xử lý Point Cloud 3D được dự báo tăng từ 1,2 tỷ USD năm 2024 lên 3,03 tỷ USD vào năm 2032, với tốc độ tăng trưởng kép hàng năm (CAGR) đạt 12,3%, được thúc đẩy bởi nhu cầu ngày càng tăng về dữ liệu không gian chính xác trong phát triển hạ tầng và dự án thành phố thông minh.
4. Ứng dụng của Point Cloud trong thực tiễn
4.1. Quy hoạch đô thị và xây dựng hạ tầng
Trong quy hoạch đô thị và hạ tầng, dữ liệu Point Cloud được sử dụng để tạo mô hình thành phố 3D và bản đồ tiện ích đô thị, hỗ trợ các nhà quy hoạch thiết kế các thành phố bền vững. Thay vì dựa vào bản đồ 2D truyền thống, các nhà quy hoạch giờ đây có thể mô phỏng tác động của dự án xây dựng mới, phân tích luồng giao thông, tối ưu hóa phân bổ không gian xanh.
Point Cloud kết hợp với GIS cho phép đánh giá nhanh hiện trạng hạ tầng: phát hiện sụt lún mặt đường, kiểm tra tình trạng cầu và đường hầm, so sánh tiến độ thi công với thiết kế BIM theo thời gian thực.
4.2. Quản lý lâm nghiệp và môi trường
Trong lâm nghiệp, Point Cloud được tạo bằng LiDAR có thể đo chiều cao cây, mật độ tán lá và đặc điểm địa hình. Dữ liệu này rất quan trọng cho các hoạt động lâm nghiệp bền vững, bao gồm khai thác gỗ và tái trồng rừng.
Đối với giám sát môi trường, dữ liệu Point Cloud phát huy hiệu quả cao trong việc theo dõi rừng, đo chiều cao cây và phát hiện suy thoái môi trường. Đặc biệt, LiDAR có khả năng xuyên qua tán lá để đo chính xác địa hình mặt đất bên dưới, điều mà ảnh vệ tinh quang học không thể làm được.
Ứng dụng quan trọng khác là ước tính trữ lượng carbon của rừng. Phần mềm lâm nghiệp tích hợp Point Cloud có thể phân loại cây và bụi cây, thân cây và tán, cây riêng lẻ, đồng thời thu thập hơn 18 thuộc tính bao gồm thể tích thân cây, độ cong và sinh khối đáp ứng nhu cầu điều tra lâm nghiệp chi tiết, quản lý rừng và giám sát carbon.
4.3. Mô hình hóa và ứng phó thảm họa
Trong quản lý thảm họa, Point Cloud hỗ trợ mô hình hóa lũ lụt, phát hiện lở đất và đánh giá thiệt hại, cho phép lập kế hoạch ứng phó khẩn cấp tốt hơn.
Cụ thể, dữ liệu địa hình 3D độ phân giải cao từ Point Cloud cho phép mô phỏng hướng chảy và phạm vi ngập lũ khi cường độ mưa thay đổi. Bằng cách hiểu các kịch bản "điều gì sẽ xảy ra nếu", các cơ quan chức năng có thể thực hiện các bước phòng ngừa trước thảm họa và tinh chỉnh kế hoạch để phản ứng nhanh và hiệu quả với những thảm họa không thể tránh khỏi.
Sau khi thảm họa xảy ra, drone tích hợp LiDAR bay qua khu vực bị ảnh hưởng có thể tạo bản đồ thiệt hại chính xác trong vài giờ, nhanh hơn hàng chục lần so với khảo sát thực địa truyền thống, cung cấp dữ liệu quan trọng cho quyết định phân bổ nguồn lực cứu trợ.
4.4. Lập bản đồ và khảo sát địa hình chính xác
Dữ liệu Point Cloud rất quan trọng và được sử dụng rộng rãi trong các ứng dụng viễn thám như giám sát môi trường, quy hoạch đô thị, lâm nghiệp và quản lý thảm họa, vì chúng cung cấp thông tin không gian chính xác về vị trí và kích thước của đối tượng, cũng như địa hình.
Trong lĩnh vực xây dựng và hạ tầng, Point Cloud đang thay thế phương pháp đo đạc truyền thống trong các dự án giao thông, đường hầm và công trình phức tạp. Dữ liệu quét 3D cho phép đối chiếu liên tục giữa hiện trạng thi công và bản thiết kế, phát hiện sai lệch trước khi chúng trở thành sự cố tốn kém.
Point Cloud không chỉ là dữ liệu, đây là ngôn ngữ mà thế giới thực dùng để tự mô tả mình trong không gian số. Từ những đám mây hàng tỷ điểm tọa độ, con người có thể tái tạo không gian với độ trung thực cao, phân tích thay đổi theo thời gian, mô phỏng rủi ro và ra quyết định với dữ liệu thay vì kinh nghiệm cảm tính.
Tin tức mới nhất
Bài viết cùng chủ đề
Bản đồ số địa chỉ đỏ Hà Nội sau 2 năm nhìn lại: Những con số biết nói
 20/07/2026
20/07/2026 
Góc nhìn: Quy chế chuyển đổi số xã phường hiện nay
14/07/2026 
Plane Detection: Công nghệ nhận diện mặt phẳng trong AR
29/06/2026 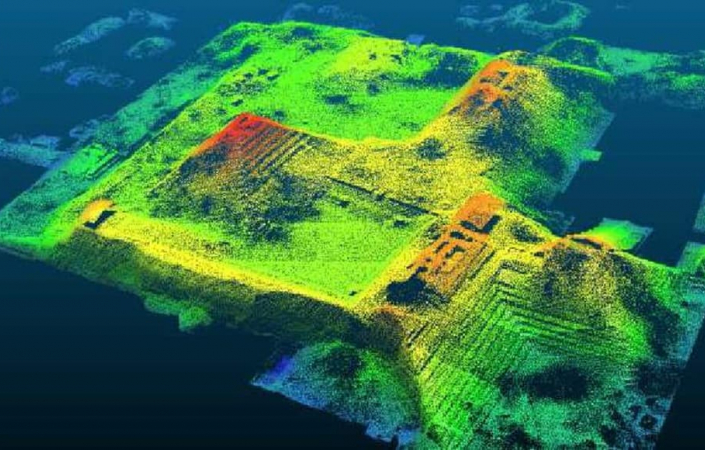
LiDAR là gì? Nguyên lý, ứng dụng và vai trò trong số hóa không gian
26/06/2026 
Light Estimation là gì? Ranh giới giữa thực và ảo
15/06/2026 
Cinematic VR là gì? Tương lai của trải nghiệm kể chuyện nhập vai
12/06/2026 
WebXR là gì? Công nghệ nền tảng cho trải nghiệm AR/VR trên trình duyệt web
12/06/2026 
Real Time 3D là gì? Ứng dụng & lợi ích cho doanh nghiệp
09/06/2026 
Thuật toán SLAM là gì? SLAM hoạt động như thế nào
02/06/2026 Khách hàng tiêu biểu




























































Đăng ký nhận thông tin từ VR360
Địa chỉ Đăng ký Giấy phép Kinh doanh: 63 Phan Đăng Lưu, Phường Hoà Cường Nam, Quận Hải Châu, Thành phố Đà Nẵng, Việt Nam
