Sign up to receive quotes
What is the SLAM algorithm? How does SLAM work?


In an era where autonomous robots, self-driving vehicles, drones, AR/VR technologies, and 3D digital mapping are advancing rapidly, one of the core technologies that enables machines to “see,” “understand,” and navigate the physical world is SLAM.
What is the SLAM algorithm? How does SLAM work? Read on to find out.
What is the SLAM algorithm?
SLAM stands for Simultaneous Localization and Mapping.
According to MathWorks, SLAM is a computational technique that enables an autonomous system to simultaneously build a map of its surrounding environment and determine its own position within that map—without relying on external positioning data such as GPS or pre-existing maps.
In simple terms, SLAM helps a device answer two questions at the same time:
“Where am I?”
“What does the environment around me look like?”
These two questions must be solved simultaneously because each depends on the other.
This is a classic circular dependency problem in robotics: to determine its location, a system needs a map; to build a map, it must know its location. SLAM addresses this challenge by continuously estimating both the map and the device’s position in parallel using probabilistic models and real-time sensor data.
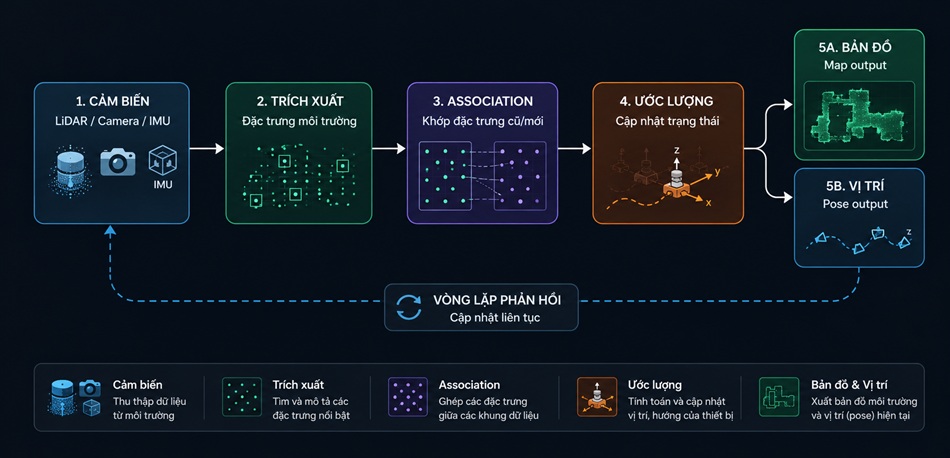
Pipeline của SLAM
How does SLAM work?
At its core, SLAM is a continuous state-estimation problem under uncertainty. A device must simultaneously move, observe, remember, and continuously refine its understanding of the surrounding environment. There are two primary approaches to solving SLAM:
Filter-Based SLAM: This approach uses Kalman Filters (EKF/UKF) or Particle Filters to maintain a probabilistic estimate of the system state. It is well-suited for smaller environments and applications that require strict real-time performance.
Graph-Based SLAM: In this approach, the robot’s movement history is represented as a pose graph, which is optimized using least-squares techniques (such as g2o or GTSAM). Graph-based SLAM generally provides higher accuracy and has become the dominant approach in modern SLAM research.
Sensor Data Acquisition: The first step in SLAM is collecting data from sensors mounted on the device. Depending on the application, the system may use:
- Cameras to capture visual information about the environment.
- LiDAR sensors to measure distances using laser beams.
- IMUs (Inertial Measurement Units) to measure acceleration, orientation, and motion.
- Radar systems to detect objects in low-visibility conditions.
- Depth sensors to determine the distance between the device and surrounding objects.
These sensors serve as the device’s “senses,” enabling it to perceive and understand its surroundings.
Feature Extraction and Description
For Visual SLAM, algorithms such as ORB, SIFT, or deep-learning-based feature detectors are used to identify keypoints in images.
For LiDAR-based SLAM, features such as planes, edges, or descriptors like FPFH (Fast Point Feature Histograms) are extracted.
The SLAM algorithm searches for distinctive landmarks in the environment, including wall corners, table edges, doorways, columns, fixed objects, or any recognizable geometric features.
For example, as a robot moves through a room, it may identify a cabinet corner, a doorway edge, or a wall intersection. These landmarks become reference points that help the robot track changes in its own position over time.
Estimating Position and Orientation: Using sensor data and the detected landmarks, the system calculates the device’s current position.
This process not only determines where the device is, but also estimates:
- Direction of movement
- Velocity
- Orientation and rotation
In robotics, this state is commonly referred to as the pose, which includes both the position and orientation of the device in space. According to MathWorks, SLAM uses data from sensors such as cameras, LiDAR, and IMUs to estimate the device’s pose, trajectory, and environmental map.
Building the Environmental Map
As the device moves, newly acquired data is combined to construct a map of the environment. This map can take several forms, including:
- 2D floor-plan maps
- 3D point cloud maps
- Occupancy grid maps showing free space and obstacles
- Immersive maps for VR and AR applications
The more frequently the map is updated, the better the device understands its surroundings. This is why a robotic vacuum can gradually learn the layout of a house after several cleaning cycles, or why a survey drone can reconstruct a detailed 3D environment from flight data.
Error Correction and Loop Closure
During navigation, errors are inevitable. Even small sensor inaccuracies can accumulate over long distances, causing map distortions and localization drift.
To address this challenge, SLAM employs a technique known as loop closure—the ability to recognize when the device has returned to a previously visited location.
When a familiar place is detected, the system compares newly observed data with previously recorded observations and uses the match to correct both the map and the estimated trajectory.
According to NVIDIA Isaac ROS, loop closure reduces uncertainty in the map by enabling the system to recognize and revisit areas that have already been observed, significantly improving long-term mapping accuracy and localization performance.
Core State Equation
p (x_t, m | z_1:t, u_1:t)
— The joint probability distribution of the pose (x) và bản đồ (m)
conditioned on all observations (z1:t) and control inputs (u1:t) up to time t
Major Types of SLAM
Visual SLAM (vSLAM)
Visual SLAM uses cameras as the primary sensor. The system analyzes images to determine the camera's position while simultaneously constructing a map of the surrounding environment. According to MathWorks, Visual SLAM is widely used in augmented reality (AR), robotics, and autonomous vehicles.
The main advantage of Visual SLAM is its low sensor cost and ease of integration into smartphones, AR glasses, compact robots, and drones. However, its performance can be affected by poor lighting conditions, low-texture surfaces, and rapidly changing environments.
LiDAR SLAM
LiDAR SLAM relies on laser-based sensors to measure distances and generate spatial maps. This approach typically delivers high accuracy, making it well-suited for autonomous vehicles, industrial robots, topographic surveying, and 3D mapping applications.
A key advantage of LiDAR SLAM is its ability to operate effectively under varying lighting conditions while producing highly detailed point clouds. The primary drawback is that LiDAR sensors are generally more expensive than cameras.
RGB-D SLAM
RGB-D SLAM combines an RGB camera with a depth sensor. In addition to capturing visual information, the system can accurately determine the distance between the device and surrounding objects.
RGB-D SLAM is particularly suitable for indoor applications, service robots, spatial modeling, and virtual reality interactions.
Multi-Sensor SLAM
Multi-Sensor SLAM integrates multiple sensing technologies, such as cameras, LiDAR, IMUs, GPS, and radar, to improve both accuracy and robustness.
For example, cameras provide visual information, IMUs supply motion data, and LiDAR delivers precise distance measurements. By fusing these data sources, the system can perform more reliably in complex and dynamic environments.
Semantic SLAM
Semantic SLAM goes beyond geometric mapping by enabling the system to understand the meaning of objects within the environment. Instead of simply detecting an object ahead, the system can identify whether it is a table, door, person, or traffic sign.
This represents a significant direction for the future of SLAM, combining traditional mapping techniques with artificial intelligence (AI) and computer vision to create more intelligent and context-aware systems.
Real world applications of SLAM?
SLAM is at the core of many technologies we use every day.
Robotic Vacuum Cleaners
SLAM enables robotic vacuum cleaners to memorize the layout of a home, identify areas that have already been cleaned, and automatically navigate back to their charging dock.
Popular devices such as iRobot Roomba and Roborock utilize LiDAR-based or Visual SLAM technologies to create floor maps and optimize cleaning routes, resulting in more efficient and systematic coverage.

Autonomous Vehicles
SLAM enables autonomous vehicles to understand their surroundings, determine their position on the road, and detect obstacles in real time.
Companies such as Tesla and Waymo combine LiDAR-based SLAM with high-definition (HD) maps to support urban navigation, even in environments where GPS signals may be unreliable.
UAVs and Drones
SLAM helps drones maintain stable flight, avoid obstacles, and generate maps of surveyed areas.
AR and VR
In AR/VR applications, SLAM allows devices to understand the physical environment and accurately anchor virtual objects within it. As users move around, virtual objects remain fixed in their intended positions, creating a realistic and immersive experience.
Industrial Automation
In industrial settings, SLAM is widely used for warehouse robots, factory inspection robots, automated systems, and production-space mapping, enabling efficient navigation and autonomous operation.
Digital Mapping and 3D Modeling
SLAM supports the collection of spatial data, the reconstruction of real-world environments, and the creation of digital foundations for 3D models, digital maps, and interactive immersive experiences.
The Future of SLAM
In the coming years, SLAM will continue to evolve alongside advancements in artificial intelligence (AI), computer vision, 3D sensing technologies, and edge computing. Next-generation SLAM systems will go beyond geometric mapping, incorporating the ability to understand context, recognize objects, predict movement, and support intelligent decision-making.
As robots, drones, autonomous vehicles, AR glasses, and other smart devices become increasingly widespread, SLAM will serve as one of the foundational technologies enabling machines to interact more naturally and effectively with the physical world.
It is important to note that SLAM is not a single algorithm, but rather a framework for solving a complex problem. Depending on the specific application, different architectures, sensor combinations, and backend optimization approaches may be selected to achieve the best performance.
In many ways, SLAM can be viewed as the “memory and navigation capability” of a machine. It enables a device to understand where it is, where it has been, and how the surrounding environment is structured, forming the basis for autonomous perception and navigation.
Latest News
Articles on the same topic
Bản đồ số địa chỉ đỏ Hà Nội sau 2 năm nhìn lại: Những con số biết nói
 20/07/2026
20/07/2026 
Góc nhìn: Quy chế chuyển đổi số xã phường hiện nay
14/07/2026 
Plane Detection: Công nghệ nhận diện mặt phẳng trong AR
29/06/2026 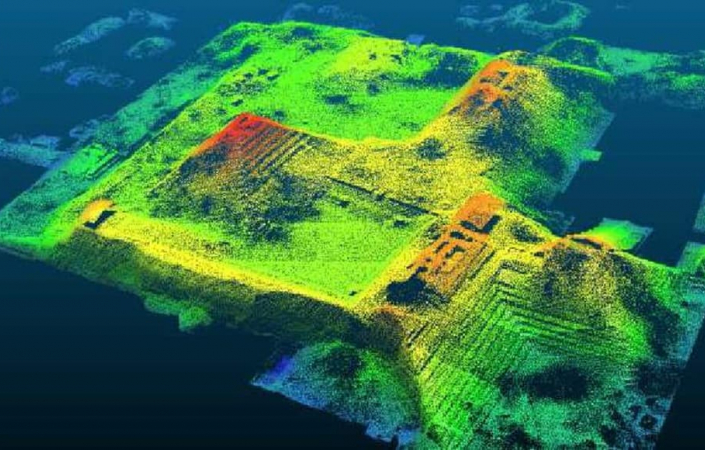
LiDAR là gì? Nguyên lý, ứng dụng và vai trò trong số hóa không gian
26/06/2026 
What is Light Estimation? The boundary between the Real and the Virtual
15/06/2026 
What Is Cinematic VR? The Future of Immersive Storytelling
12/06/2026 
What Is WebXR? The Foundational Technology Behind Browser-Based AR and VR Experiences
12/06/2026 
What Is a Point Cloud? The foundational technology behind 3D spatial digitization
10/06/2026 
What Is Real-Time 3D? Applications and Benefits for Businesses
09/06/2026 Typical customers




























































Sign up to receive information from VR360
Business License Registration Address: 63 Phan Dang Luu, Hoa Cuong Nam Ward, Hai Chau District, Da Nang City, Vietnam
