Sign up to receive quotes
What Is a Point Cloud? The foundational technology behind 3D spatial digitization

Table of content
Point Cloud hoạt động như thế nào?
Thiết bị thu thập dữ liệu Point Cloud
Point Cloud được thu thập như thế nào?
Lợi ích của Point Cloud trong số hóa không gian
Ứng dụng của Point Cloud trong thực tiễn
Quy hoạch đô thị và xây dựng hạ tầng
Quản lý lâm nghiệp và môi trường
Mô hình hóa và ứng phó thảm họa
Lập bản đồ và khảo sát địa hình chính xác

When a building, industrial facility, or even an entire city needs to be digitized with centimeter-level accuracy, few technologies can match the capabilities of Point Cloud. It serves as the foundational dataset behind many of today’s most advanced digital solutions, including Digital Twins, 3D mapping, spatial analysis, and topographic surveying.
This article provides a comprehensive overview of Point Cloud technology, explaining what it is, how data is captured and processed, and why it has become a critical component of modern 3D spatial digitization. Read on to learn more.

1. What is Point Cloud?
A Point Cloud is a highly detailed digital representation of a three-dimensional object or environment. At its core, a Point Cloud consists of a collection of spatial data points, where each individual point represents a specific location on the surface of a scanned object and is defined by its X, Y, and Z coordinates.
When a 3D scanner captures the shape of a physical object, building, or landscape, the resulting dataset is typically stored as a Point Cloud.
In addition to spatial coordinates, each point may also contain visual attributes such as color information (RGB) and reflectance intensity, providing a richer and more realistic representation of the scanned environment. Multiple scan positions are often combined to create a complete Point Cloud of an entire scene, which can then be imported into most CAD, BIM, and Digital Twin platforms for further analysis and modeling.
To better understand the concept, imagine standing in front of a historic building and needing to capture every architectural detail with absolute precision. Instead of relying on 2D photographs or manually measuring individual features, a laser scanner emits millions of laser pulses across the structure and records the exact 3D coordinates of each reflected point. The result is a dense "cloud" of points that reconstructs the entire building with millimeter-level accuracy.
Despite being composed of discrete data points rather than continuous surfaces, Point Clouds have become one of the fundamental technologies for representing and analyzing three-dimensional digital environments.
Real-World Applications of Point Clouds
- Cultural Heritage Preservation: Museums and heritage organizations use laser scanning to digitize artifacts, monuments, and historical sites, creating permanent 3D archives for preservation and research.
- Construction and BIM Validation: Construction firms capture as-built conditions and compare them with Building Information Modeling (BIM) data to verify accuracy and monitor project progress.
- Forestry and Environmental Analysis: Drones equipped with LiDAR sensors scan forests to measure tree canopy heights, estimate timber volume, and support environmental monitoring.
- Smart Cities and Digital Twins: Municipalities create large-scale urban Point Clouds to develop Digital Twins that support city planning, infrastructure management, and smart city initiatives.
2. How does Point Cloud work?
2.1. Point Cloud data acquisition technologies
3D Point Clouds are generated using a variety of scanning technologies and data-capture methods, including LiDAR, UAV/Drone surveying, Global Navigation Satellite Systems (GNSS), structured light scanning, and photogrammetry. These technologies collect geometric and spatial information by measuring distances, light patterns, or reflected signals.
The most commonly used data acquisition technologies include:
LiDAR (Light Detection and Ranging)
LiDAR is a form of machine vision technology that emits laser pulses and measures their reflections back to a sensor, functioning in a way similar to how the human eye perceives depth. Each reflected laser point captured by the sensor becomes a data point within the Point Cloud, collectively forming a highly accurate 3D representation of the scanned environment.
Terrestrial Laser Scanners
These stationary or mobile scanning systems are widely used to capture buildings, bridges, tunnels, mines, and infrastructure assets with extremely high resolution and accuracy.
Drones (UAVs)
Drone-based scanning is ideal for surveying large-scale environments such as forests, coastlines, transportation corridors, and construction sites. It enables rapid data collection across extensive areas, making it particularly valuable for forestry, environmental monitoring, and topographic surveying.
Photogrammetry
Photogrammetry generates Point Clouds by analyzing multiple photographs of a scene captured from different viewpoints. This method allows standard cameras or drones without LiDAR sensors to reconstruct 3D environments from imagery, offering a significantly more cost-effective alternative to laser scanning.
2.2. How is Point Cloud captured?
The Point Cloud acquisition process typically consists of the following stages:
Step 1: Field Scanning
Scanning equipment—such as laser scanners, LiDAR-equipped drones, or cameras—is positioned at multiple strategic locations around the object or area being digitized. Each scan position generates a local Point Cloud dataset.
Step 2: Registration and Data Alignment
The individual scans are registered and merged into a unified Point Cloud representing the entire scene. This process relies on control points, GNSS references, or registration algorithms such as Iterative Closest Point (ICP) to accurately align overlapping datasets.
Step 3: Noise Filtering and Data Cleaning
Raw Point Cloud data inevitably contains noise caused by unwanted reflections, moving objects, environmental conditions, or hardware limitations. During this stage, outlier points and inaccuracies are removed to improve overall data quality and reliability.
2.3. Point Cloud data processing
Once captured, Point Cloud datasets typically undergo post-processing to enhance accuracy, optimize usability, and prepare the data for integration with various applications and platforms.
Key processing steps include:
Classification: Points are categorized according to object types, such as terrain, buildings, vegetation, utilities, or infrastructure assets. Classification is essential for extracting meaningful information from raw spatial data.
3D Mesh Generation: A 3D mesh model is reconstructed from the Point Cloud by connecting neighboring points into polygonal surfaces. Any gaps, imperfections, or missing areas are subsequently refined and corrected to improve model completeness.
Integration with BIM, GIS, and Digital Twin Platforms: Processed Point Cloud data can be imported into platforms such as Autodesk Revit, ArcGIS, and various Digital Twin systems. This enables advanced applications including spatial analysis, asset management, facility operations, urban planning, and infrastructure lifecycle management.
3. Benefits of Point Cloud in spatial digitization
Exceptional Accuracy Compared to Traditional Methods: Point Cloud technology can achieve millimeter-level accuracy, significantly reducing measurement errors associated with manual surveying while dramatically shortening on-site data collection time. This level of precision makes it particularly valuable for engineering, construction, heritage preservation, and infrastructure projects.
Comprehensive and Realistic Spatial Reconstruction: A Point Cloud serves as a highly detailed 3D snapshot of a real-world environment, where each point contains spatial coordinates and, in many cases, color information. This enables the faithful reconstruction of buildings, landscapes, and assets, often replacing traditional surveying and documentation workflows.
A Flexible Data Foundation for Multiple Applications: Point Clouds support a wide range of use cases, including the creation of 3D CAD models, GIS datasets, dimensional inspection, quality control, and reverse engineering. They also serve as the foundation for visualization, animation, rendering, simulation, and large-scale customization workflows across various industries.
Rapid Data Collection at Scale: Modern LiDAR-equipped drones can capture vast areas in a relatively short period of time. Within just a few hours, a single survey mission can scan hundreds of hectares of forest, urban environments, industrial facilities, or transportation corridors, providing comprehensive spatial data with minimal field effort.
Digital Preservation of Cultural Heritage: Historical monuments, cultural artifacts, archaeological sites, and heritage structures can be documented with exceptional precision without physical contact. This creates permanent digital archives that preserve valuable cultural assets for future generations while supporting conservation, restoration, and educational initiatives.
The Foundation of Digital Twins and AI-Powered Spatial Analytics: Point Clouds provide the underlying spatial framework for building highly accurate Digital Twins—virtual representations of real-world environments. When combined with artificial intelligence and machine learning technologies, Point Cloud data enables automated spatial analysis, including:
- Change detection over time
- Structural condition monitoring
- Predictive maintenance and damage forecasting
- Urban planning optimization
- Infrastructure asset management
- Strong Market Growth Reflects Increasing Industry Value
The growing adoption of Point Cloud technology is reflected in the rapid expansion of the global market. The 3D Point Cloud processing software market is projected to grow from USD 1.2 billion in 2024 to USD 3.03 billion by 2032, representing a compound annual growth rate (CAGR) of 12.3%. This growth is largely driven by increasing demand for high-precision spatial data in infrastructure development, construction, and smart city initiatives.
4. Applications of Point Cloud
4.1. Urban Planning and Intrastructure development
In urban planning and infrastructure development, Point Cloud data is used to create 3D city models and urban utility maps, helping planners design more sustainable and resilient cities. Instead of relying solely on traditional 2D maps, planners can now simulate the impact of new construction projects, analyze traffic flows, and optimize the allocation of green spaces and public infrastructure.
When integrated with Geographic Information Systems (GIS), Point Clouds enable rapid assessment of existing infrastructure conditions. This includes detecting road surface subsidence, inspecting the structural integrity of bridges and tunnels, and comparing construction progress against BIM designs in near real time. The result is more accurate decision-making, improved project management, and enhanced efficiency throughout the infrastructure lifecycle.
4.2. Forestry and environmental management
In forestry applications, LiDAR-generated Point Clouds can be used to measure tree height, canopy density, and terrain characteristics with high accuracy. This data plays a crucial role in sustainable forest management activities, including timber harvesting, reforestation planning, and ecosystem monitoring.
For environmental monitoring, Point Cloud data is highly effective in tracking forest conditions, measuring vegetation growth, and detecting environmental degradation. One of LiDAR's key advantages is its ability to penetrate dense forest canopies and capture accurate ground elevation data beneath the vegetation—something traditional optical satellite imagery cannot achieve.
Another important application is forest carbon stock estimation. Forestry software integrated with Point Cloud data can classify vegetation into categories such as shrubs, tree trunks, canopies, and individual trees. It can also extract more than 18 different attributes, including trunk volume, stem curvature, and biomass. These capabilities support detailed forest inventories, sustainable forest management, and carbon monitoring programs, which are increasingly important for climate change mitigation and carbon credit initiatives.
4.3. Disaster modeling and emergency response
In disaster management, Point Cloud technology supports flood modeling, landslide detection, and damage assessment, enabling authorities to develop more effective emergency preparedness and response strategies.
High-resolution 3D terrain data generated from Point Clouds allows engineers and disaster management agencies to simulate flood behavior under different rainfall scenarios, including water flow direction, flood extent, and areas at greatest risk. By understanding these “what-if” scenarios, decision-makers can implement preventive measures before disasters occur and refine response plans to react more quickly and effectively when emergencies arise.
Following a disaster, LiDAR-equipped drones can rapidly survey affected areas and generate highly accurate damage maps within a matter of hours. This process is significantly faster than traditional field surveys—often by an order of magnitude—while providing critical spatial data for assessing impacts, identifying inaccessible locations, and prioritizing the allocation of emergency resources and recovery efforts.
As climate-related risks continue to increase worldwide, Point Cloud technology is becoming an essential tool for disaster risk reduction, resilience planning, and post-disaster recovery management.
4.4. Accurate mapping and topographic surveying
Point Cloud data is a critical component of modern remote sensing applications and is widely used in environmental monitoring, urban planning, forestry, and disaster management. It provides highly accurate spatial information about the location, dimensions, and characteristics of objects, as well as detailed terrain and surface conditions.
In the construction and infrastructure sectors, Point Clouds are increasingly replacing traditional surveying methods for transportation projects, tunnels, and complex engineering structures. 3D scanning data enables continuous comparison between as-built conditions and design models, helping project teams identify deviations early—before they develop into costly construction issues.
Point Clouds are more than just data; they are the language through which the physical world describes itself in digital space. From billions of spatial coordinates, organizations can reconstruct environments with remarkable accuracy, monitor changes over time, simulate potential risks, and make informed decisions based on data rather than assumptions.
As a foundational technology for Digital Twins, smart infrastructure, and spatial analytics, Point Clouds are transforming the way we understand, manage, and interact with the built and natural environment.
Articles on the same topic

What is Light Estimation? The boundary between the Real and the Virtual
 15/06/2026
15/06/2026 
What Is Cinematic VR? The Future of Immersive Storytelling
12/06/2026 
What Is WebXR? The Foundational Technology Behind Browser-Based AR and VR Experiences
12/06/2026 
What Is Real-Time 3D? Applications and Benefits for Businesses
09/06/2026 
What is the SLAM algorithm? How does SLAM work?
02/06/2026 
Case Study: Cách ứng dụng Virtual tour trong công tác tuyển sinh
25/05/2026 
VR360’s Fact #10: Vì sao AR có thể đặt vật thể ảo đúng ngoài đời thật?
22/05/2026 
VR360's Fact #9: Google Maps biết đường có kẹt xe bằng cách nào?
18/05/2026 
VR360's Fact #8: Tốc độ truyền dẫn Internet nhanh nhất thế giới?
18/05/2026 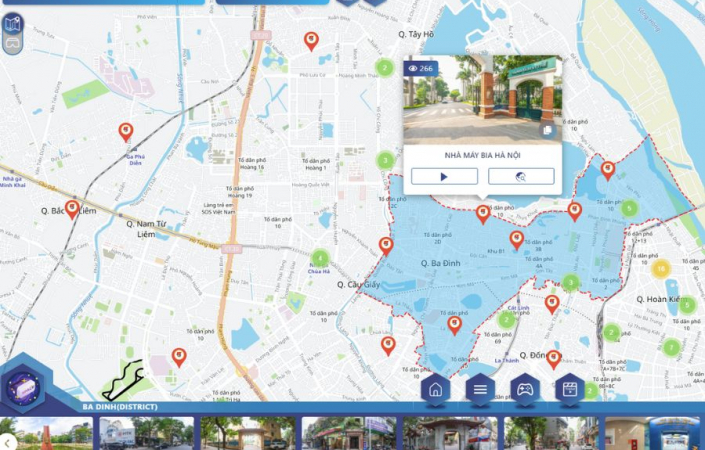
VR360’s Fact #7: Bản đồ số không chỉ để xem đường
12/05/2026 Typical customers




























































Sign up to receive information from VR360
Business License Registration Address: 63 Phan Dang Luu, Hoa Cuong Nam Ward, Hai Chau District, Da Nang City, Vietnam
